NEWS
Radio fix system lifting antenna mast
Time:2021-07-02 View:
Radio fix system refers to the technology of positioning by measuring the position of fixed or moving objects by using the linear constant speed propagation characteristics of radio waves. There are radar, radio fix, radio navigation system and global positioning system in radiocompas.
Definition
Radio refers to the electromagnetic wave propagating in free space (including air and vacuum), which is a limited frequency band. The upper frequency is 300GHz (gigahertz), and the lower frequency is relatively inconsistent, in various RF specifications, there are three 3kHz to 300GHz(ITU-International Telecommunication Union regulations),9kHz to 300GHz,10kHz to 300GHz.
Radio fix system determines the distance, distance difference, orientation and other positioning parameters, and then use the position line to determine the location of undetermined points (such as ship position).
Positioning System
The positioning system used is divided into: ① Pulse Radio fix system according to the principle of determining the positioning parameters such as distance or distance difference, which is based on the principle that the propagation time of radio signals is proportional to the propagation distance, measure the time interval between the pulse signal emitted by the ship platform and the response pulse signal of the shore platform, and calculate the distance or distance difference; ② phase Radio fix system, according to the principle that the phase change in radio signal propagation is proportional to the propagation distance, the distance or distance difference is obtained by measuring the phase difference of two consecutive signals; ③ pulse-phase Radio fix system. There are many working modes, which can be divided into two-distance positioning, hyperbolic positioning, two-side position positioning, polar coordinate positioning, etc.
Radar
RADAR comes from the English phrase "radio detection and ranging" RADAR, which is a device that uses electromagnetic waves to detect and locate targets. It emits electromagnetic waves to the target and receives its Echo, thus obtaining information such as the distance, radial velocity, orientation and height of the target to the radar. When using radar to locate ground or sea targets, it is to measure the distance and orientation of the target relative to radar> when locating air targets, it is necessary to measure the distance, orientation and height at the same time, this kind of radar is called three-coordinate radar. When Pulse radar measures range of target, it actually measures the time difference between transmitting pulses, because electromagnetic waves propagate at the speed of light, thus the distance of the target can be calculated; the orientation of the target is measured by the sharp beam of the radar antenna, and the elevation angle of the target is measured by the narrow elevation beam; According to the elevation angle and distance of the measured target. The height of the target can be obtained. Radar positioning is used for searching and guiding, tracking and measuring, and fire control on the Army; Civil aspects can be used for airport and harbor management, traffic control, weather forecast and uranology.
Radio Navigation
Radio navigation uses electromagnetic wave propagation and combines astronomy, geography, ocean and other related knowledge to realize the positioning and navigation of moving carriers such as ships and planes by measuring relevant parameters of moving carrier positions. Navigation and positioning are closely related, and continuous positioning is essentially navigation. Most radio navigation systems are cooperative, that is, they rely on navigation station to transmit navigation signals, so that the moving carriers can accurately determine their positions according to each navigation station orientation, stars and landforms. Many launch sources are located on the ground, and can also be installed on satellites or planes. There are many ways to give radio waves navigation information, and they are all based on the constant speed and rectilinear propagation of radio waves. The basic elements of radio navigation technology are angle measurement and distance measurement, so it can form systems such as angle measurement-angle measurement, distance measurement-distance measurement, angle measurement-distance measurement and distance difference (hyperbolic).
(1) the angle measuring system determines the angle between the moving carrier and a reference line (commonly used magnetic north reference line N) by measuring the direction of radio waves to realize positioning.
(2) the ranging system realizes navigation and positioning by measuring the distance between the user and the ground navigation station. The ranging system has three ways: forwarding, reflection and pseudo-range measurement. When pseudo-range measurement is adopted, both users and navigation stations are equipped with precision clocks and radiate signals according to strictly determined time. After receiving the signal, the user determines the propagation delay r according to his own clock, thus obtaining pseudo-range ρ = cr, in which c is the speed of light. The pseudo-range ρ contains the real distance r between the user and the navigation station, and uses the station where 4 or more clocks are synchronized with each other to measure 4 or more pseudo-ranges, establish four or more equations, and solve the equation to obtain the user's position coordinates.
(3) distance difference system is to measure the distance between the user and two ground stations, also known as hyperbolic system. To measure a hyperbolic position, two ground stations need to be used. To further locate, the intersection of two position lines needs to be used, and more than three ground stations need to be used. Multiple ground platforms can form a platform chain.
(4) velocity measurement system is to measure the speed of motion body. This system is based on Doppler effect, works according to radar mode, obtains position coordinates through integral operation, and is used on aircraft.
(5) multi-parameter system uses the relationship between several parameters and geometric parameters in electromagnetic radiation for navigation and positioning. Among them, Roland C. The system not only uses pulse ranging difference to obtain rough measurement data, eliminates multi-value, but also uses continuous wave phase difference to obtain precise measurement data. Roland D navigation system and Pulse 8 are its derived systems. Takang navigation system is also a multi-parameter navigation system. It is an inquiry-response ranging system, and amplitude modulation is carried out on the radiation pulse signal to generate modulation envelope, use envelope phase to measure the user's orientation relative to the ground table. Takang navigation system uses the intersection of straight line position line and circular position line to locate.
In order to determine the position of the motion carrier in a single value, two or more position lines of the motion carrier relative to navigation station must be found, and the intersection of the two position lines is the position of the motion carrier. The so-called position line is the trajectory of a point with the same value for a certain geometric parameter (such as Included angle, distance, distance difference, etc.) measured by the moving carrier. The most common position lines are straight lines, circles, and hyperbolic lines. As shown in the figure.
Linear Position Line, that is, equal azimuth line, remains unchanged with the reference direction passing through navigation station or motion carrier. For navigation station A, the orientation of motion carrier M is aM, for motion carrier M, the orientation of navigation station is aA, and AM is a linear position line with equal orientation, as shown in Figure 1(a).
The position line keeping a constant distance from navigation station is a circular position line centered on navigation station, as shown in Figure 1(B), R is a constant. The distance difference between two navigation station A and B measured from motion carrier M Rd,Rd maintained
A、 B navigation station M sports carrier
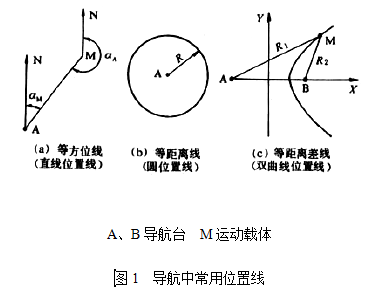
The constant equidistance difference line is a hyperbolic position line, as shown in Figure 1(c).
The positioning method of the intersection of equal azimuth position line and equal distance position line is called p-θ positioning method (such as Takang navigation system). The location method of intersection between equidistant position line and equidistant position line is called the location method of ρ-ρ. The positioning method of the intersection of hyperbolic position lines and hyperbolic position lines is called hyperbolic positioning method (such as table card, Roland c, ormiga and other navigation systems).
Global Positioning System (GPS)
The United States and the Soviet Union have successively developed similar systems. It is called "navigation star" timing and ranging global positioning system. It can provide high-precision three-dimensional position, three-dimensional velocity and time information for any object from the ground to 9,000km in the world in real time and all weather. GPS system consists of space (satellite), ground monitoring and user receiver. The space part has 18 (or 21) navigation satellites with a height of 20,000 kilometers, operating on 6 circular orbital planes with an inclination of 55 °, each side is 60 ° apart, the orbital period is 12h, which ensures that more than 4 satellites with an elevation angle greater than 5 ° can be seen at any time at any place on the Earth. Each navigation star contains an atomic clock with a stability of 10-13/day, this is the basis of GPS's accurate positioning and timing. Each satellite continuously sends navigation signals at two frequencies in the L-band, and uses spread spectrum technology to improve anti-interference capability. These two signals are called coarse test code (C/A code) and fine test code (P Code) respectively. The former can be used for civil use, positioning within 25m; The latter is dedicated to military, positioning accuracy within 1~10m. Both signals contain information such as satellite conditions, system time, and ephemeris (current and future positions) of the satellite being tracked by the receiver.
The control part consists of a main control station and five distributed monitoring stations. Each monitoring station measures satellite position, speed and time data as well as atmospheric parameters of each station and sends them to the main control station, after data processing, the latter obtains data such as ephemeris, star clock deviation and ionosphere delay of each star, and then injects the satellite every 12 hours to update the data on the star.
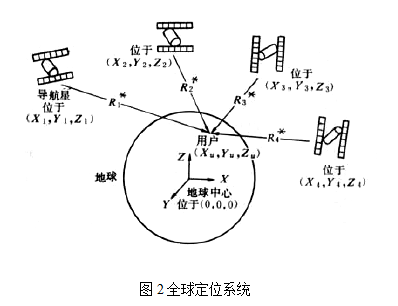
The global positioning system is shown in figure 2. The user receiver can receive the ranging code driven by the star clock from 4 satellites at the same time, and measure the delay from the star to the receiver, then calculate the pseudorange  from the user to each star.
from the user to each star.
from the user to each star. , I =1,2,3,4
, I =1,2,3,4The relationship between pseudorange and satellite and user coordinates and clock difference is

In the formula, c is the speed of light; △Tu is the clock error of the user, and xiYiZi is the coordinate of the I satellite, which is provided by navigation information. According to this, ×U, Yu, Zu and △tu (×uyuzu) can be solved. It is a user's rectangular coordinate with the center of the Earth as the origin and can be converted into commonly used longitude, latitude and height.
GPS system is not only widely used in military, but also used in aviation, navigation, exploration, surveying and mapping, geophysics and tourism.